Clasificarea corpurilor solide[]
Tipurile de corpuri întâlnite în studiul rezistenţei materialelor se pot grupa, după forma lor geometrică, în trei mari categorii (pentru fiecare fiind dezvoltate relaţii de calcul specifice):
a) Corpuri lungi – bare, fire sau cabluri – având una dintre dimensiuni (“lungimea”) predominantă faţă de celelalte două, sunt caracterizate prin axa lor longitudinală (care poate fi dreaptă sau curbă) şi prin secţiunea transversală (perpendiculară pe axa longitudinală), care este un element definitoriu pentru capacitatea de rezistenţă a corpului. După destinaţia lor, barele pot fi solicitate la tracţiune (tije, tiranţi), compresiune (coloane, stâlpi), forfecare (nituri, pene), încovoiere (osii, grinzi) sau răsucire (arbori).
b) Corpuri subţiri – plăci, membrane, învelitori (vase, tuburi cu pereţi subţiri, carcase, cupole) – cu două dimensiuni mari faţă de cea de-a treia, sunt caracterizate prin forma şi mărimea secţiunii lor mediane şi prin grosime (măsurată pe direcţia perpendiculară la suprafaţa mediană).
c) Corpuri masive – au toate cele trei dimensiuni de acelaşi ordin de mărime. Pot fi bile, role, tuburi cu pereţi groşi, discuri de turbo-maşini, blocuri de fundaţii ş.a.m.d.
O mare parte dintre structurile inginereşti uzuale reprezintă piese care pot fi modelate ca bare. Pe de altă parte, studiul barelor drepte este mult mai simplu decât al celorlalte forme de corpuri, astfel încât formează fundamentul rezistenţei materialelor. De altfel, începuturile acestei discipline s-au făcut prin cercetări asupra barelor, care au precedat cu mult apariţia primelor abordări analitice ale teoriei elasticităţii.
Forţe şi momente[]
{kind=link}
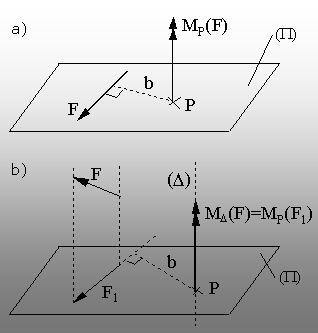
Fig. 1.1. Calculul momentului unei forţe a) faţă de un punct; b) faţă de o axă.
Se numesc forţe acei vectori care, aplicaţi asupra unor puncte materiale, produc deplasări (translaţii) ale lor. Spre deosebire de acestea, momentele (cuplurile de forţe) sunt vectori care produc rotiri (rotaţii) ale părţilor de corp asupra cărora acţionează. Aceste rotiri au loc în jurul axei care reprezintă direcţia vectorului moment. Forţele şi momentele luate în considerare în studiul rezistenţei materialelor pot fi de mai multe tipuri:
a) exterioare (de contur)
- sarcini – implicate de îndeplinirea rolului funcţional al piesei;
- masice – distribuite în întregul volum al piesei (greutatea, forţele de inerţie sau electromagnetice);
- de legătură (reacţiuni) – rezultate din interacţiunile cu alte corpuri.
b) interioare (eforturi) – exprimă acţiunea părţilor de corp faţă de restul corpului, putând fi puse în evidenţă numai prin secţionarea imaginară a corpului studiat, aflat în stare solicitată.
Fig. 1.1. Calculul momentului unei forţe
a) faţă de un punct; b) faţă de o axă.
Se reaminteşte că o forţă F, acţionând la distanţa (b) faţă de un punct P, produce în raport cu acel punct un moment
M P (F) = F ´ b (1.1)
care este un vector, cu originea în P, direcţia normală planului format de F şi P, iar sensul dat de regula burghiului drept (fig. 1.1.a).
În acelaşi fel, o forţă F produce un moment în raport cu o axă (D), cu care nu este paralelă şi nici concurentă. Pentru a calcula acest moment, se duce un plan (P) perpendicular pe axa (D) şi proiecţia F1 a forţei F pe acest plan (fig. 1.1.b). În aceste condiţii, dacă intersecţia axei cu planul este punctul P, atunci momentul forţei faţă de axă este
M (D) (F) = M P (F1) (1.2)
Tipuri de încărcări (sarcini)[]
Asupra structurilor întâlnite în practica inginerească acţionează forţe şi momente care pot fi grupate după mai multe criterii, dintre care importante sunt următoarele trei:
a. Modul de aplicare
- sarcini concentrate – se consideră aplicate într-un singur punct (în realitate sunt forţe distribuite pe suprafeţe foarte mici, astfel încât se înlocuiesc în mod permanent prin rezultantele lor); se măsoară în [N], respectiv în [N m];
- sarcini distribuite
- uniform – cu intensitate constantă
- neuniform – cu intensitate variabilă, după o lege liniară, parabolică, sinusoidală etc.
Sarcinile distribuite se măsoară în unităţi de forţă sau moment raportate la [m] sau la [m2], după cum se repartizează pe o axă (dreaptă sau curbă), respectiv pe o suprafaţă.
b. Modul de acţiune în timp
- sarcini statice – cu aplicare lentă, progresivă;
- sarcini dinamice – cu variaţii de viteză sau acceleraţie
- aplicate prin şoc;
- variabile – periodic sau neperiodic.
c. Destinaţia piesei
- sarcini utile – rezultate nemijlocit din îndeplinirea rolului funcţional;
sarcini accesorii (de obicei nedorite) – forţe de frecare, de inerţie etc.
Calculul rezultantelor sarcinilor distribuite[]

{kind=link}
Fig. 1.2. Rezultantele forţelor distribuite.
Această operaţie apare ca necesară în toate problemele care implică lucrul cu sarcini distribuite. Deoarece forţele distribuite sunt întâlnite mai frecvent, se preferă a se explica modul de calcul aferent acestui tip de distribuţie, iar rezultantele momentelor distribuite se vor calcula similar cu rezultantele distribuţiilor de forţe.
Pe de altă parte, trebuie observat că pentru forţele distribuite este necesar să se calculeze şi momentul global faţă de un punct (sau de o axă), ceea ce implică o discuţie specială. Se consideră o forţă distribuită după o funcţie oarecare q(x), pe distanţa egală cu (b-a) (fig.1.2), pe direcţie perpendiculară pe axa unei bare drepte. Se propune a se calcula forţa rezultantă, precum şi momentul rezultant produs în raport cu punctul arbitrar P de pe bara considerată. Se reaminteşte că valoarea acestui moment este egală cu a momentului rezultant faţă de axa, perpendiculară pe planul forţei, care trece prin P.
Calculul forţei rezultante[]
Se începe prin a se pune în evidenţă, ca în figură, forţa elementară (dF) a distribuţiei, reprezentată de suma forţelor (q) care acţionează pe distanţa infinit mică (dx). Valoarea forţei elementare va fi dF = q(x) dx. Deoarece forţa rezultantă este suma tuturor componentelor q(x) de pe distanţa (b-a) rezultă, la modul general, următoarea relaţie de calcul:

.gif){kind=link}
Relaţia (1.3)
Dacă funcţia de distribuţie este cunoscută şi primitiva ei este uşor de calculat, atunci rezultanta se poate stabili imediat, cu relaţia de mai sus. Pe de altă parte însă, cunoscându-se interpretarea geometrică a acestei relaţii, se poate formula următoarea regulă de calcul:
Rezultanta unei forţe distribuite este numeric egală cu aria suprafeţei care reprezintă încărcarea distribuită respectivă. Prin urmare, pentru încărcările care reprezintă figuri geometrice elementare, se poate evita calculul integralei din relaţia (1.3), înlocuindu-l prin simpla determinare a ariei geometrice a încărcării. Punctul de aplicaţie a rezultantei va fi centrul de greutate G al suprafeţei care reprezintă încărcarea. Trebuie observat că, în calculele obişnuite, este importantă doar coordonata (xG), de pe axa barei. În altă ordine de idei, este important să se precizeze că multe dintre calculele implicate de rezolvarea problemelor de rezistenţa materialelor se preferă a fi efectuate sub formă literală, înlocuirea simbolurilor cu datele numerice urmând a se face doar în relaţiile finale de calcul. Acest mod de lucru permite să se păstreze un grad mare de generalitate în rezolvarea problemelor, precum şi să se menţină legătura, pe parcursul rezolvării, cu fenomenele fizice la care se referă aplicaţia considerată. De exemplu, intensitatea forţelor distribuite se exprimă prin numere înmulţite cu simbolul (q) – cu unitatea de măsură [N/m], iar distanţele prin numere înmulţite, de obicei, cu (a) sau (l), măsurate în [m]. Prin urmare, rezultanta unei forţe distribuite se va exprima în funcţie de simbolul (q∙a), având ca unitate de măsură [N]. În plus, rezultă că o mărime notată prin factorul (qa) înmulţit cu un număr (întreg sau fracţionar) va reprezenta, în principiu, o forţă concentrată.
Calculul momentului rezultant[]
Momentul rezultant al unei forţe distribuite, în raport cu un punct arbitrar P, se poate calcula cu relaţia generală de forma:


{kind=link}
(1.4)
Cunoscând, din mecanica teoretică, teorema care precizează că rezultanta momentelor elementare este egală cu momentul, faţă de punctul P, al rezultantei forţelor q(x), rezultă că:


{kind=link}
(1.5)
Se observă că această relaţie simplifică mult calculele, astfel că va fi preferată relaţiei (1.4) în toate cazurile în care coordonata (xG) este uşor de stabilit pentru încărcarea distribuită concretă. Unitatea simbolică de măsură a momentelor rezultante va fi, în calculele literale, de forma (q∙a2), măsurată în [Nm]. Rezultă că o mărime identificată prin factorul (qa2) înmulţit cu un număr (întreg sau fracţionar) va reprezenta, în principiu, un moment concentrat.
Atenţie: Rezultantele momentelor forţelor distribuite reprezintă momente concentrate imaginare, conform regulilor generale formulate mai sus! Ca urmare, aceste momente vor fi incluse în sumele de momente faţă de axele (z) din diferite puncte ale planului în care acţionează solicitarea, alături de momentele încovoietoare concentrate şi de momentele forţelor concentrate incluse în plan.
Aplicarea practică a noţiunilor prezentate în acest paragraf se va face în cadrul exemplelor privind calculul reacţiunilor.
Reazeme şi reacţiuni[]
Corpurile solide care sunt desemnate să preia diverse încărcări trebuie să-şi păstreze, pe parcursul funcţionării ansamblului din care fac parte, o poziţie bine stabilită, adică să le fie împiedicate deplasările nedorite.
Dacă rezultanta (R1) a unui sistem de forţe care acţionează asupra unui corp solid este diferită de zero, atunci corpul respectiv se va deplasa prin translaţie, pe direcţia şi în sensul rezultantei (R1). Pentru a se împiedica această mişcare (deci pentru a fixa corpul), este nevoie de o forţă (R), egală şi opusă lui (R1).
În mod similar, dacă există şi este nenul momentul (M1) al rezultantei (R1) de mai sus, în raport cu un punct sau cu o axă oarecare, atunci corpul se va roti, faţă de reperul considerat, în conformitate cu sensul lui (M1). Pentru evitarea acestei mişcări, trebuie să se acţioneze asupra corpului cu un moment (M), de mărime egală şi de sens opus lui (M1).
Sarcinile (R) şi (M) se numesc reacţiuni, deoarece rezultă din rezemarea corpului, adică din acţiunea asupra lui a reazemelor care îi vor prelua, total sau parţial, posibilităţile de mişcare (gradele de libertate).
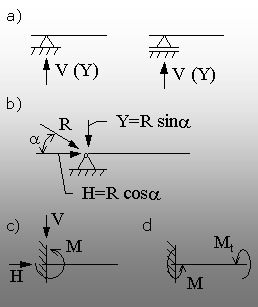
În studiul rezistenţei materialelor se utilizează, în principiu, trei tipuri de reazeme (fig. 1.3):
{kind=link}
Fig. 1.3. Tipuri de reazeme
a) Reazemul simplu – împiedică deplasarea corpului pe direcţia axei reazemului, în punctul de sprijin, deci introduce o singură reacţiune, de tip forţă.
b) Reazemul articulat (articula-ţia) – împiedică orice translaţie a corpului, în punctul de sprijin; cum un corp are, în plan, posibilitatea de a transla pe două direcţii, iar în cazul spaţial pe trei direcţii, rezultă că o articulaţie introduce reacţiuni de tip forţă pe două, respectiv pe trei direcţii (perpendiculare între ele), după cum problema se discută în plan sau în spaţiu.
c) Reazemul încastrat (încastrarea) – fixează în totalitate corpul (adică îi preia toate gradele de libertate) în punctul de sprijin; ca atare, acest reazem introduce şase reacţiuni (trei de tip forţă, trei de tip moment, distribuite după axele de coordonate) – în cazul spaţial, respectiv trei (două forţe şi un moment) – în cazul plan.
Atenţie: Reacţiunile care nu sunt nule într-o încastrare corespund solicitării exterioare aplicate piesei! Ca atare, într-o bară supusă numai la încovoiere (fig.1.3.c) nu există moment de răsucire în încastrare, iar într-o bară solicitată numai la răsucire (fig.1.3.d) – reacţiunea de tip moment încovoietor şi cele de tip forţă vor fi nule.
Ecuaţii de echilibru[]
Faptul că un corp solid se află în echilibru (fig. 1.4) sub acţiunea sarcinilor exterioare se poate exprima, din punct de vedere matematic, prin condiţiile de egalitate cu zero a rezultantelor forţelor şi momentelor care îl încarcă.
{kind=link}
Fig. 1.4. Studiul stării de echilibru
pentru un corp solid. În privinţa forţelor, aceasta înseamnă că suma proiecţiilor forţelor, pe fiecare dintre axele de coordonate ale sistemului tri-ortogonal arbitrar (Oxyz), trebuie să fie egală cu zero:
{kind=link}
(1.6)
Vor fi, prin urmare, trei astfel de ecuaţii, în cazul general, “spaţial”, respectiv două – pentru solicitările care produc efecte într-un singur plan.
Pe de altă parte, este necesar ca suma momentelor produse de toate încărcările aplicate piesei, în raport cu fiecare dintre axele de coordonate duse printr-un punct arbitrar O, să fie zero:


{kind=link}
(1.7)
În acest fel se scriu încă trei ecuaţii – într-o problemă “spaţială”, respectiv doar una (în raport cu axa perpendiculară pe planul forţelor, singura axă faţă de care forţele respective pot să producă momente) – în cazul plan.
Rezultă că starea de echilibru a unui corp se exprimă prin şase ecuaţii, în problemele în spaţiu, respectiv prin trei – la solicitările într-un singur plan. Acestea se numesc ecuaţii de echilibru şi sunt folosite la calculul reacţiunilor, adică al forţelor şi momentelor aplicate de reazeme asupra corpului care se propune a fi studiat.
Calculul reacţiunilor este, de obicei, prima etapă în rezolvarea unei probleme de rezistenţa materialelor, întrucât numai după găsirea lor se poate considera cunoscută în întregime încărcarea exterioară a corpului respectiv. Problemele din rezistenţa materialelor pentru care numărul N al reacţiunilor de determinat este egal cu numărul E de ecuaţii de echilibru care pot fi scrise, deci N = E, se numesc probleme static determinate.
Acele probleme în care numărul N este mai mare decât E se numesc static nedeterminate, iar numărul n = N-E este gradul nedeterminării unei asemenea probleme.
După cum rezultă din definiţia momentului unei forţe în raport cu o axă, în cazul unei probleme plane ecuaţia de echilibru pentru momente se va calcula, de fapt, în raport cu un punct oarecare (P) din planul forţelor de solicitare. Astfel, dacă acest plan include axele (x) şi (y) ale sistemului, atunci se poate scrie că
{kind=link}
(1.8)
Metoda secţiunilor[]

{kind=link}
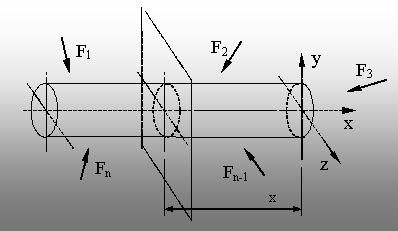
Fig. 1.9. Principiul metodei secţiunilor.
Este vorba despre metoda folosită în studiul modului cum evoluează starea de solicitare de-a lungul unui corp solid aflat în echilibru sub o încărcare oarecare. Se admite că intensitatea solicitării, într-o anumită secţiune transversală, se exprimă prin forţele şi momentele interioare (numite eforturi) care pot fi evidenţiate în secţiunea respectivă.
Prin secţionarea imaginară a corpului (imaginat, pentru simplitate, sub formă de bară – fig. 1.9) cu un plan normal la axa longitudinală, situat la distanţa (x) faţă de unul dintre capete, se obţin două părţi de corp care, în principiu, nu se mai află în echilibru (fig. 1.10), adică rezultanta forţelor şi/sau momentelor care acţionează asupra lor diferă de zero. Echilibrul fiecăreia dintre părţi se poate reface prin introducerea, pe cele două feţe ale secţiunii (x), a perechilor simetrice (R) şi (M), care reprezintă de fapt rezultantele eforturilor interioare din secţiunea respectivă a piesei.


{kind=link}
Fig. 1.10. Rezultantele eforturilor interioare din secţiunile transversale ale unei bare, sub acţiunea unei solicitări oarecare.
Trebuie subliniat că sursa dezechilibrului părţilor de corp este îndepărtarea lor după secţionare. Ca urmare, rezultantele de mai sus exprimă efectele interacţiunii celor două părţi şi se vor calcula prin sumarea încărcărilor situate de o parte, respectiv de cealaltă, faţă de secţiunea (x).
Tipuri de eforturi[]
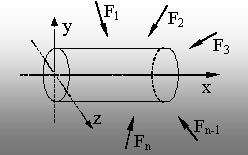
Proiecţiile rezultantelor (R) şi (M) pe axele de coordonate permit punerea în evidenţă a celor şase tipuri posibile de eforturi din secţiunile transversale ale unei piese solicitate într-un mod oarecare (fig. 1.12).
Efectele acestor eforturi, atunci când sunt prezente (adică sunt diferite de zero) într-o secţiune a unei piese de tip bară, se concretizează în apariţia unor solicitări asupra piesei respective, aşa cum se arată în continuare. Acolo unde este cazul se menţionează sensul eforturilor care sunt considerate, prin convenţie, de semn pozitiv (fig. 1.11). Se precizează că, în general, în rezistenţa materialelor se notează cu (x) axa de coordonate tangentă la axa longitudinală a barei.
Efortul axial N(x) se calculează ca sumă algebrică a proiecţiilor pe axa barei ale forţelor aflate de o parte sau de alta faţă de secţiunea (x). Tinde să producă deplasări ale secţiunilor pe direcţia axei longitudinale, adică solicitarea de tracţiune-compresiune. Luând în considerare acest efect, în mod obişnuit se consideră pozitiv efortul axial care supune la întindere secţiunea (x) (adică “iese” din secţiune) şi negativ efortul de sens contrar.
Eforturile tăietoare Ty(x), Tz(x) se calculează ca sume algebrice ale proiecţiilor, pe axele (y) şi (z) din secţiunea considerată, ale forţelor situate de o parte sau de alta faţă de secţiune. Tind să producă “lunecări” reciproce ale feţelor secţiunii, deci solicitarea de forfecare. Se consideră pozitive dacă tind să rotească bara în sens orar, în raport cu secţiunea (x), în planele longitudinale care le conţin.

Efortul de tip moment Mx(x), notat şi Mt(x) este suma algebrică a momentelor, calculate faţă de axa barei, ale tuturor încărcărilor acţionând de o parte sau de cealaltă faţă de secţiunea (x). Tinde să producă rotiri reciproce ale secţiunilor barei, adică solicitarea de răsucire. Deoarece nu există o diferenţă, în sens fizic, între rotirea unei secţiuni în sens orar şi cea în sens antiorar, nu se defineşte un sens considerat pozitiv al momentelor de răsucire.
Momentele de direcţie perpendiculară pe axa barei, notate Miy(x) şi Miz(x), se calculează ca sume algebrice ale momentelor produse, faţă de axele (y) şi (z) din secţiune, de toate încărcările aflate pe bară de o parte sau de alta a secţiunii (x). Tind să producă rotiri (îndoiri) ale axei barei, în respectiva secţiune, în jurul axei pe care acţionează momentul, adică solicitarea de încovoiere. Prin convenţie, se consideră pozitive momentele care curbează “în sus” marginile barei în raport cu secţiunea (x), în planul longitudinal perpendicular pe axa de îndoire.


{kind=link}
Fig. 1.12. Componentele tensiunii şi ale eforturilor
dintr-o secţiune oarecare a barei
Tipuri de solicitări[]
Este uşor de imaginat faptul că prezenţa simultană a celor şase tipuri de eforturi, în secţiunile transversale ale pieselor uzuale, este un fenomen care se petrece foarte rar. Cel mai des aceste eforturi sunt în număr de două sau trei, iar unul dintre ele este predominant pentru calculele de rezistenţă. Se spune că solicitările aplicate corpurilor solide studiate în rezistenţa materialelor sunt de două mari categorii:
- simple – în cazul în care în toate secţiunile piesei există un singur tip de efort interior
- compuse – dacă măcar într-o secţiune a piesei apar cel puţin două proiecţii nenule ale rezultantelor (R) şi (M).
În principiu se consideră că există piese solicitate în mod tipic la tracţiune - fire, lanţuri, cabluri; – la compresiune - stâlpi, coloane; – la forfecare - nituri, şuruburi, suduri; – la răsucire - arbori de transmisie, spire de arc elicoidal; – la încovoiere - osii, arcuri de foi, grinzi cu sarcini transversale.
Noţiunea de tensiune[]
Pentru a exprima cât de puternic este solicitată o piesă oarecare nu este suficient a se vorbi despre mărimea forţelor şi momentelor aplicate asupra ei, deoarece intensitatea solicitării va depinde şi de masa de material care participă la preluarea solicitării, adică de forma şi dimensiunile piesei. Prin urmare, este necesar să se definească o mărime relativă care să permită evidenţierea acestei dependenţe.
Considerând, pe o secţiune transversală a piesei studiate, un element de arie (dA), suficient de mic pentru ca eforturile interioare să poată fi calificate drept uniform distribuite pe suprafaţa lui, rezultanta lor (dF) va avea punctul de aplicaţie în centrul de greutate al ariei elementare (dA) (fig.1.12). Prin definiţie, tensiunea din acel punct al piesei va fi:


{kind=link}
(1.16)
Aceasta este o mărime fundamentală pentru studiul rezistenţei materialelor, mai complexă decât forţa, deoarece depinde şi de orientarea elementului de arie respectiv faţă de direcţia forţei. Prin urmare, se vor obţine valori diferite ale tensiunii pe direcţii diferite, în jurul unui punct P din volumul unei piese solicitate într-un mod oarecare.
Sunt importante componentele rezultate din proiecţia tensiunii (p) pe axa barei – tensiunea normală (s) din punctul P, respectiv pe secţiunea transversală – tensiunea tangenţială (t) din P. Desigur că între aceste componente există relaţia:
p 2 = s 2 + t 2 (1.17)
Pe de altă parte, tensiunea tangenţială are şi ea două componente, pe direcţiile axelor de coordonate din secţiunea transversală, notate (txy) şi (txz), primul indice arătând axa perpendiculară pe secţiune, iar cel de-al doilea – axa paralelă cu respectiva componentă a tensiunii.
Unitatea de măsură pentru tensiuni este aceeaşi cu a presiunilor, adică Pascalul, 1Pa=1N/m2. Această unitate este foarte mică, astfel că se preferă multiplul ei, 1MPa=106Pa=1N/mm2.
Operaţiile care se fac cu vectorii-forţe pot fi aplicate componentelor de tensiune numai după înmulţirea lor cu ariile pe care se distribuie, fiind astfel transformate în mărimi de tip forţă.
Ansamblul tensiunilor dintr-un punct al unui corp solicitat într-un mod oarecare reprezintă starea de tensiuni din punctul respectiv.
Ecuaţiile de echivalenţă[]
Sunt expresii matematice reprezentând legătura dintre eforturile interioare care acţionează într-o secţiune transversală a unei bare şi componentele de tensiune din secţiunea respectivă. După cum rezultă din figura 1.12, ecuaţiile de echivalenţă se scriu:
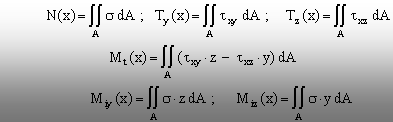

{kind=link}
(1.18)
Aceste ecuaţii îşi vor dovedi utilitatea în cadrul studiului solicitărilor simple, la stabilirea relaţiilor pentru calculul tensiunilor din secţiunile transversale.
Principiul dualităţii tensiunilor tangenţiale[]
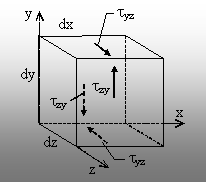
{kind=link}
Fig. 1.13.
Se consideră un paralelipiped elementar (de laturi dx, dy şi dz) din interiorul unui corp solid solicitat într-un mod oarecare (fig. 1.13), astfel încât pe feţele sale perpendiculare pe planul (yOz) apar tensiunile tangenţiale tyz şi tzy.
După cum s-a arătat mai sus, se poate considera că aceste tensiuni produc efecte similare unor forţe, obţinute prin înmulţirea lor cu ariile suprafeţelor pe care se plasează.
Studiul echilibrului acestor forţe în raport cu sistemul de axe considerat conduce la scrierea unei singure ecuaţii de echilibru semnificative – ecuaţia momentelor faţă de axa (x):
tyz×(dx dz)dy - tzy×(dx dy)dz = 0 (1.19) După cum se observă, din această ecuaţie se obţine egalitatea tyz = tzy , care poate fi exprimată, la modul general, astfel:
Existenţa tensiunilor tangenţiale (tzy) într-un plan oarecare dintr-un corp solicitat implică apariţia unor tensiuni egale (tyz) într-un plan perpendicular pe primul şi pe direcţia tensiunilor (tzy). Aceste perechi de tensiuni tangenţiale au orientare simetrică faţă de muchia comună a celor două plane.
Acest enunţ reprezintă principiul dualităţii tensiunilor tangenţiale, iar existenţa lui simplifică mult calculele în cazul solicitărilor la care predomină această categorie de tensiuni.
Deplasări şi deformaţii[]
În prezentul paragraf sunt introduse două noţiuni de primă importanţă în studiul rezistenţei materialelor, legate în mod direct de considerarea solidelor drept deformabile.
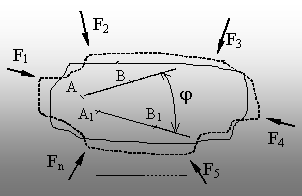

{kind=link}
Fig. 1.14
Pentru definirea acestor noţiuni se poate analiza situaţia punctelor din interiorul unui corp de formă arbitrară, solicitat într-un mod oarecare (fig. 1.14). Liniile punctate se referă la situaţia dinainte de producerea solicitării, iar liniile continue – la corpul deformat în urma aplicării solicitării.
Se numesc deplasări schimbările poziţiei punctelor unui corp solid, ca urmare a deformării lui sub o solicitare oarecare. Pot fi:
- deplasări liniare – distanţele (AA1) sau (BB1) dintre poziţiile ocupate de punctele respective înainte şi după producerea deformării;
- deplasări unghiulare (rotiri) – unghiul dintre segmentele de dreaptă (AB) şi (A1B1) determinate de două puncte din corp înainte şi după deformare.
Se numesc deformaţii variaţiile dimensiunilor geometrice în vecinătatea unui punct al corpului studiat, ca urmare a solicitărilor aplicate asupra lui. Şi acestea pot fi:
- liniare (alungiri sau scurtări) – modificarea distanţei dintre două puncte ale corpului; exemplu DL = A1B1 – AB;
- unghiulare (lunecări) – modificarea unghiului dintre două segmente din vecinătatea punctului dat.
Mărimile de tip liniar se măsoară în unităţi de lungime, cele unghiulare – în radiani sau, mai rar, în grade.
Pentru a se înlesni compararea deformaţiilor a două corpuri, se apelează la mărimi relative (adimensionale):
- deformaţia specifică (e) – raportul dintre deformaţia liniară absolută şi lungimea iniţială
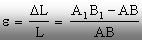
{kind=link}
(1.20)
- lunecarea specifică (g) – unghiul care marchează variaţia, după deformare, a unghiului iniţial drept dintre două plane din corpul studiat (fig. 1.15); se consideră pozitivă în cazul în care unghiul drept se micşorează.
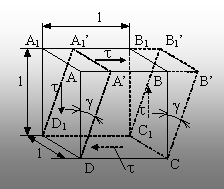
{kind=link}
Fig. 1.15
Deformaţiile specifice liniare (e) şi lunecările specifice (g) reprezintă mărimi fundamentale în studiul rezistenţei materialelor, cu ajutorul cărora se evaluează tipul şi nivelul deformaţiilor unei structuri elastice, sub acţiunea unei anumite solicitări.
Totalitatea valorilor deforma-ţiilor specifice din jurul unui punct dintr-un corp solicitat într-un mod oarecare formează starea de deformaţii din acel punct.
Dacă s-ar măsura, printr-o metodă oarecare, aceste deformaţii specifice, s-ar putea constata că valorile lor se obţin diferite, în funcţie de planul sau direcţia în care se face măsurarea. Din acest motiv, ele se exprimă de obicei prin componentele lor pe axele de coordonate (x), (y) şi (z) ale unui sistem orto-normat oarecare, având originea în punctul considerat, respectiv în planele determinate de aceste axe.
Aceste componente se notează (ex), (ey) şi (ez) – pentru deformaţiile specifice liniare, respectiv (gxy), (gyz) şi (gzx) – pentru lunecările specifice. Pe cunoaşterea lor se bazează studiul amănunţit şi riguros al stărilor de tensiuni şi deformaţii din diverse tipuri de corpuri, în cazul solicitărilor din domeniul elastic al deformabilităţii materialelor, ceea ce formează obiectul unei discipline separate, numită Teoria elasticităţii.